
Smashbotz Sessons 2/12/22

Since I’d had so many gearbox failures last time, this competition was all about testing changes I made to the drive. Namely, shock mounting. So much shock mounting it’s practically suspension.
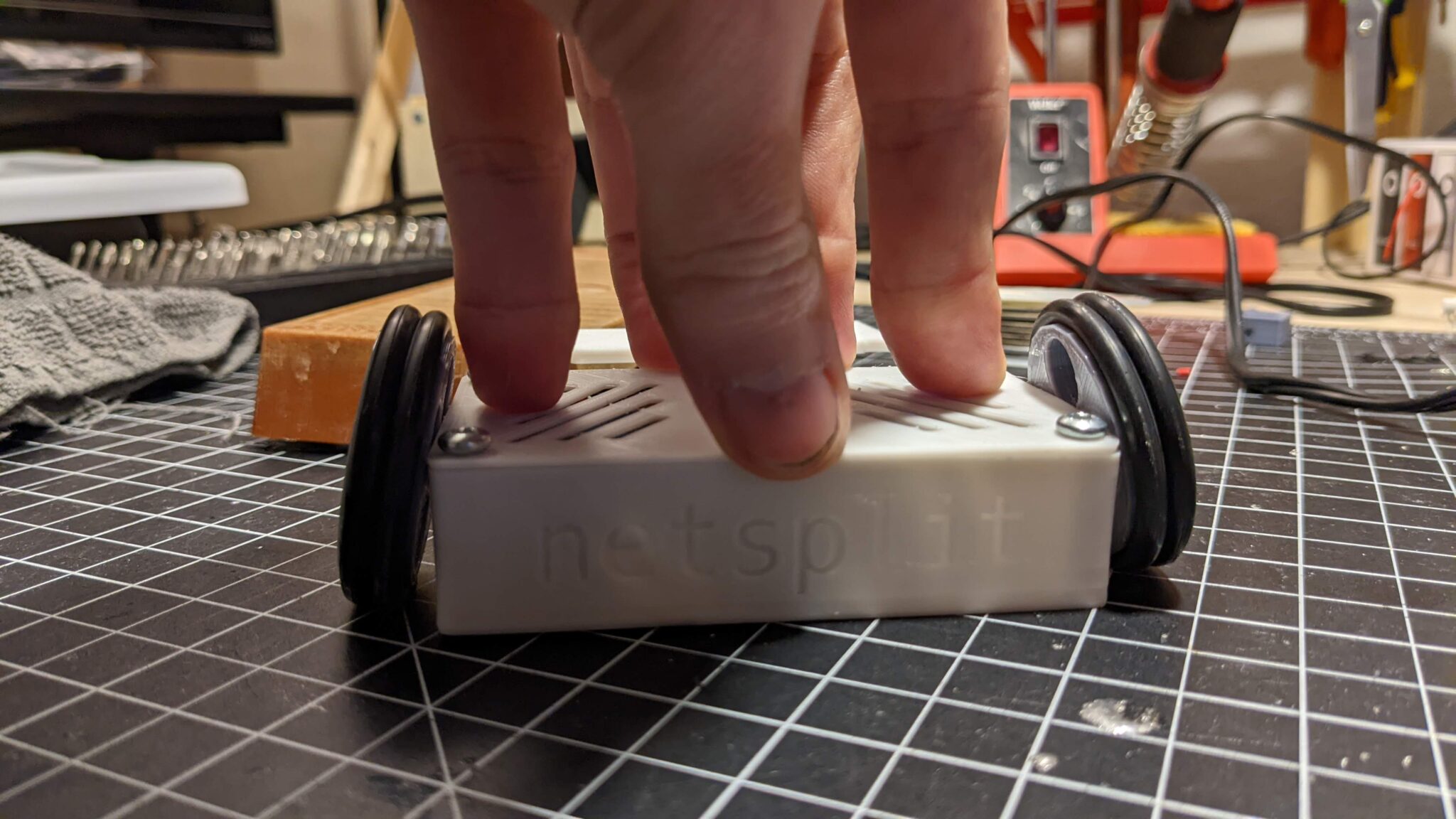
I did a TON of testing driving this robot around in my test box. Hitting 150g chunks of 2×4, throwing it against the walls, throwing the 2×4 chunks at it. Etc. I’d also brought two new tire configurations to test on the slippery floor, the double O ring pictured above, and some chunky foam tires that only make weight because I downsized the electronics to the Malenki Nano.
And just because I hadn’t changed enough, I also have all new asymmetrical MOI-optimized weapon bars!
On to the first fight then, against a powerful horizontal Dingleberry.
Mk223 on the smashbotz discord also shared these awesome action shots:


This fight went… okay. I didn’t expect the motor to fly out right away after all my testing, but I’m always pleased with how well this thing drives with just one wheel. It’s much better if the wheel and motor are off than when the gearbox is locked up. Almost makes me want to design a one-wheeled bot… Anyway, I got some great hits in with the new asymmetrical bar and disabled their weapon, and spent the rest of the match chasing them around getting pot shots where I could. It’s great to start off with a win even if it wasn’t perfect.
Next up was against Mini Surrenderbot, a reliable wedge:
This fight was a blast. The wheels came off even more quickly than last time, but I stayed operational for a good while considering. Because of the way the motors are falling out, they don’t actually take any damage, so this is still an improvement over last competition where I was losing 1-2 motors a fight. That gets expensive. The double O-ring tire didn’t really make much of a difference in traction unfortunately, I think only one ever touches the surface so there ends up being no benefit.
I decided to prepare for my next fight by hot gluing the motors onto their mounts, then zip ties, then more hot glue. The mounts are still springs, and hot glue has some give to it, so I think this should be a happy medium. I also throw on the foam tires so I wouldn’t waste the opportunity to test them.
Next up is Eggplant Surprise:
I decided to run upside down to hopefully interface with their weapon, but I think this wasn’t the right move. It’s a lot harder to control upside down, and their weapon might actually be too low to hit anything of value after all. The foam tires definitely helped with control.
Being upside down and spun up for the entire fight highlighted a known weakness that hasn’t really come up before:

To keep the spinner off the ground I use this long finger part of the lid, and the weapon retainer rides on it. These get hot and melt, sometimes fusing together which is what stopped my weapon both times. A quick hit against the wall or another weapon, while simultaneously ramping the throttle will usually unstick it and get everything molten again. I keep the lid part small, and bring plenty of spares for this reason, everything is ablative.
We traded some good hits and neither really did much functional damage to the other. The combination of hot glue and foam wheels totally fixed my motors-falling-out problem. Eggplant surprise took some healthy chunks out of the tires and chassis where I was too slow getting out of the way.
I’m not sure what happened when I got knocked out. I still had control for a few seconds after that last hit, the weapon spun back up and I drove away and then nothing. I tried power cycling the transmitter and entering bind mode to no avail, the Malenki Nano showed the power light but no connection light. After the fight I could see no evidence of damage to wiring, nothing was particularly hot. Simply turning it off and on again fixed it, which makes me think it’s something to do with the receiver in the Nano.
Now to prepare Netsplit and Failover for Matterhackers Mayhem!